
به نام خدا
اسپیدکنترل – جلسه سیزدهم
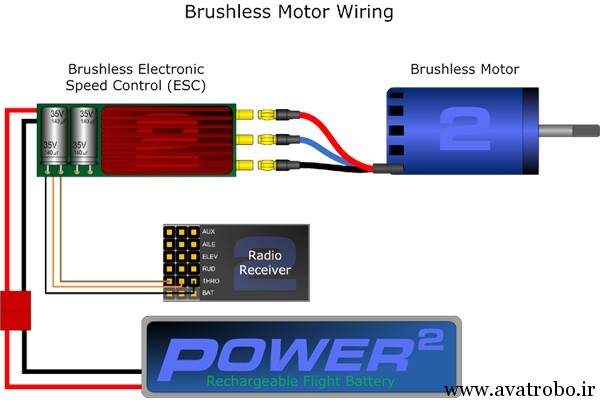
اسپیدکنترل در کوادکوپتر ها وسیله ای برای کنترل دور موتور ها توسط فلایت کنترلر می باشد . سه سیم خروجی اسپیدکنترل به سه سیم موتور براشلس متصل می شود و سه سیم ورودی آن ( قطر این سیم ها نسبت به سایر سیم های اسپیدکنترل کمتر می باشد ) به خروجی های فلایت کنترل وصل می شود و در نهایت دو سیم دیگر آن به باتری متصل می شود .
اسپیدکنترل ها در هواپیما های الکتریکی نیز کاربرد دارند . در هواپیما های الکتریکی معمولا اسپیدکنترل مستقیما به رسیور رادیوکنترل وصل میشود .
نکته قابل توجه در انتخاب این قطعه جریان قابل تحمل این قطعه است که بر روی آن نوشته میشود . در شکل زیر میبینید که بر روی آن ۴۰A نوشته شده است که نشان دهنده این است که حداکثر جریانی که میتواند تحمل کند ۴۰ آمپر میباشد . برای انتخاب اسپیدکنترلر باید ابتدا به جریان موتور مورد نظرمان که در دیتاشیت آن نوشته شده است توجه کنیم و اسپیدکنترل خود را با توجه به آن انتخاب کنیم . مثلا اگر حداکثر جریام موتور ما ۲۰ آمپر باشد میتوان گفت باید یک اسپیدکنترل ۲۵ آمپر انتخاب کرد ( یک اختلاف ۵ تا ۱۰ آمپری ) .

در شکل زیر نحوه اتصال اسپیدکنترل ها ، موتور ها ، باتری و فلایت کنترل NAZE32 را برای یک کوادکوپتر می بینید .

نحوه اتصال اسپیدکنترل در هواپیما :
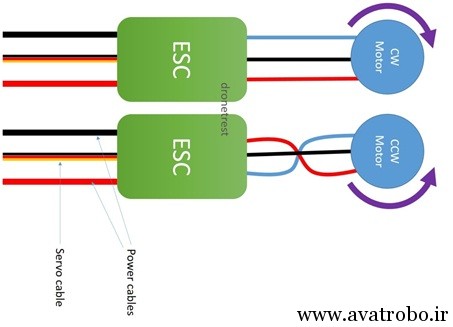
نکته قابل توجه این است که برای عوض کردن جهت چرخش موتور می توان جای دو سیم از سه سیمی که به موتور براشلس وصل می شوند را عوض کرد . مانند شکل زیر :


دیدگاهها (0)