
به نام خدا
پروژه ی ساخت ربات تمیز کننده با استفاده از آردوینو

ربات های تمیز کننده های کف زمین پدیده ی جدیدی نیستند. اما همگی یک مشکل بزرگ دارند. آن ها بسیار گران تر از کاری که انجام می دهند هستند. امروز ما یک ربات تمیز کننده ی خانه با آردوینو می سازیم که هزینه اش در مقایسه با نمونه ی بازاری بسیار پایین تر است. این ربات توانایی کشف موانع و اشیای مقابل خود را دارد و می تواند از بین آن ها عبور کند . کف را تمیز کند.
قطعات لازم برای پروژه ی ساخت ربات تمیز کننده:
آردوینو یونو RS
سنسور آلتراسونیک
شیلد درایو موتور آردوینو
شاسی ربات و چرخ
باتری برای موتور
پاور بانک برای آردوینو
برس کفش
قبل از شروع بحث در مورد پروژه در مورد سنسور آلتراسونیک کمی صحبت می کنیم.
سنسور آلترا سونیک:
سنسور آلتراسونیک HC-SR04 برای محاسبه ی فاصله ی ۲ سانتی متر تا ۴۰۰ سانتی متر با دقت سه میلیمتر استفاده می شود که شامل یک فرستنده و یک گیرنده و مدار کنترل است.این سنسور موجی با فرکانس ۴۰ کیلوهرتز را ساتع می کند
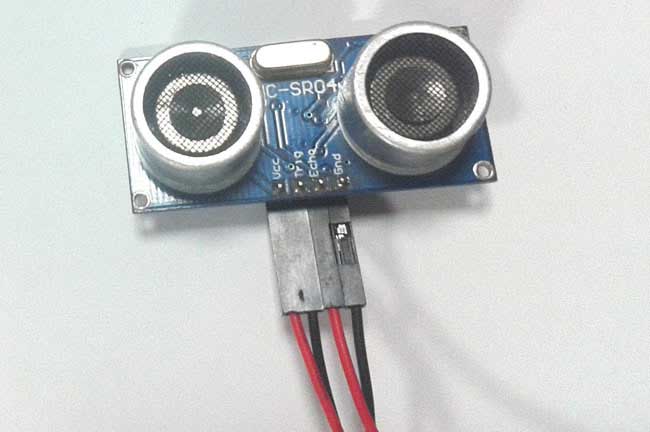
سنسور HCSR04 هنگامی پین Trigger را high کنیم موجی فراصوت ایجاد می کند که هشت سیکل دارد، هنگامی که موج به مانعی برخورد کرد ، توسط گیرنده دریافت می شود و یک پالس خروجی از خود ایجاد می کند. اگر فاصله از مانع زیاد باشد مدت زمان بازگشت آن زیاد می شود و اگر نزدیک باشد آن را سریع تر دریافت می کند.
ما میتوانیم فاصله را با استفاده از فرمول زیر بدست بیاوریم.
Distance= (Time x Speed of Sound in Air (343 m/s))/2.
مقدار به دو تقسیم شده است زیرا فاصله ی رفت و برگشت یکی می باشد.
فاصله در سانتی متر = ۱۷۱۵۰*T

شماتیک مدار:
همانطور که در شکل زیر مشاهده می کنید سنسور آلتراسونیک به آردوینو متصل است و درایو موتور نیز به شیلد ربات متصل است.

پین تریگر سنسور آلتراسونیک به پین ۱۲ متصل است و پین اکوی آن به پین ۱۳ وصل شده ست. شیلد موتور حداقل دو خروجی دارد و باید به موتور ها وصل باشند. باتری خود و پاور بانک را به شیلد موتور و آردوینو متصل کنید.
دانلود کد پروژه ربات تمیز کننده:
دانلود فایل#include <AFMotor.h>
#define trigPin 12
#define echoPin 13
AF_DCMotor motor1(1,MOTOR12_64KHZ);
AF_DCMotor motor2(2, MOTOR12_8KHZ);
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance < 20) {
motor1.setSpeed(255);
motor2.setSpeed(0);
motor1.run(BACKWARD);
motor2.run(BACKWARD);
delay(2000); //CHANGE THIS ACCORDING TO HOW THE ROBOT TURNS.
}
else {
motor1.setSpeed(160); //CHANGE THIS ACCORDING TO HOW FAST YOUR ROBOT SHOULD GO.
motor2.setSpeed(160); //CHANGE THIS TO THE SAME VALUE AS YOU PUT IN ABOVE.
motor1.run(FORWARD);
motor2.run(FORWARD);
}
}





دیدگاهها (0)