
به نام خدا
فلایت کنترل در پهپاد – جلسه چهاردهم
فلایت کنترل ( FC ) وسیله ایست که داده های سنسور و دستورات کاربر را می خواند و با توجه به آن ها سرعت موتور ها را تغییر می دهد و تعادل پرنده را در حالت های مختلف حفظ می کند .
همه فلایت کنترل ها دارای Gyro ( Gyroscope ) یا همان شتاب سنج زاویه ای و ACC ( Accelerometer ) یا همان شتاب سنج خطی هستند . فلایت کنترل های پیشرفته علاوه بر این دو سه سنسور ؛ دارای سنسور های Barometer یا همان فشار سنج برای اندازه گیری ارتفاع ، GPS و Compass یا همان قطب نما نیز هستند .
سخت افزار فلایت کنترل ها تقریبا مشابه است و از نرم افزار و رابط کاربری متفاوتی نسبت به هم برخوردارند که همین امر باعث متفاوت بودن نحوه پرواز می شود .
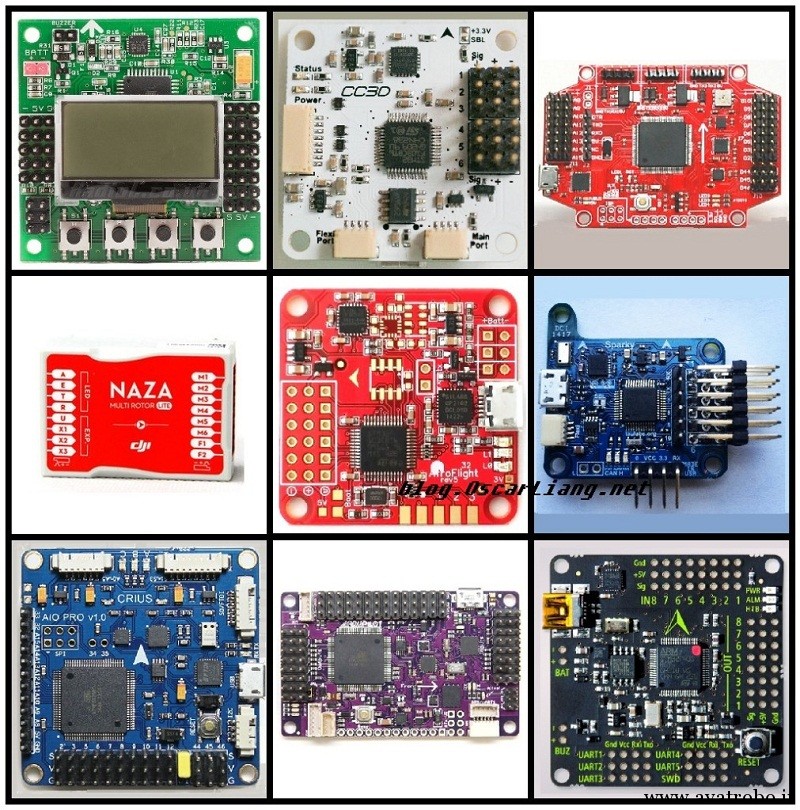
فلایت کنترل ها قیمت ها و کیفیت ها و امکانات متفاوتی دارند . در زیر در مورد فلایت کنترل های مختلف بحث کرده ایم تا بتوانید فلایت کنترل مناسب برای کار خود را انتخاب کنید .
یک پرواز خوب نیازمند یک فلایت کنترل مناسب می باشد . فلایت کنترل ها در شرایط مختلف برتری های متفاوتی نسبت به هم دارند . انتخاب فلایت کنترل به عوامل زیادی همچون نوع پرواز ، رابط کاربری آسان ، توانایی وصل شدن به GPS ، اندازه فلایت کنترلر و … بستگی دارد .
در زیر مقایسه توانایی ها و قیمت چند مدل فلایت کنترل را میبینید .
| FC Name | Price | RX Modes | Baro/Compass | GPS | MicroController |
| APM 2.6 | $۵۰ | PWM, PPM | External | Yes | ۸-bit, 16MHz |
| BrainFPV | $۱۳۰ | PWM, PPM, S.Bus, DSM, HoTT | Internal/External | Yes | ۳۲-bit, 168MHz |
| CC3D | $۱۴ | PWM, PPM, S.Bus, DSM | No | Limited | ۳۲-bit, 72MHz |
| Crius AIO | $۴۸ | PWM, PPM | Internal/External | Yes | ۸-bit, 16MHz |
| Flip32 | $۲۴ | PWM, PPM, S.Bus | No | Limited | ۳۲-bit, 72MHz |
| KK2.1.5 | $۲۲ | PWM, PPM | No | No | ۸-bit, 16MHz |
| Multiwii SE 2.5 | $۱۵ | PWM, PPM | Internal | Yes | ۸-bit, 16MHz |
| Naza M Lite | $۱۷۰ | PWM, PPM, S.Bus | External | Yes | unknown |
| Naza M V2 | $۳۰۰ | PWM, PPM, S.Bus | External | Yes | unknown |
| Naze32 Acro | $۲۵ | PWM, PPM, S.Bus | No | Limited | ۳۲-bit, 72MHz |
| Naze32 Full | $۵۳ | PWM, PPM, S.Bus | Yes | Yes | ۳۲-bit, 72MHz |
| Quanton | $۶۶ | PWM, PPM, S.Bus, DSM, HoTT | Internal/External | Yes | ۳۲-bit, 168MHz |
| Revo | $۱۳۰ | PWM, PPM, S.Bus, DSM | Internal/External | Yes | ۳۲-bit, 168MHz |
| Sparky | $۶۰ | PPM, S.Bus, DSM | Internal | Yes | ۳۲-bit, 72MHz |
| Sparky 2 | $۳۵ | PPM, SBUS, DSM | ۳۲-bit, | ||
| SPRacing F3 | $۶۵ | PPM, SBUS, DSM | ۳۲-bit, | ||
| Tornado F3 | $۲۹ | PPM, SBUS, DSM | ۳۲-bit, | ||
| DoDo F3 | $۵۰ | PPM, SBUS, DSM |
۳۲-bit, |
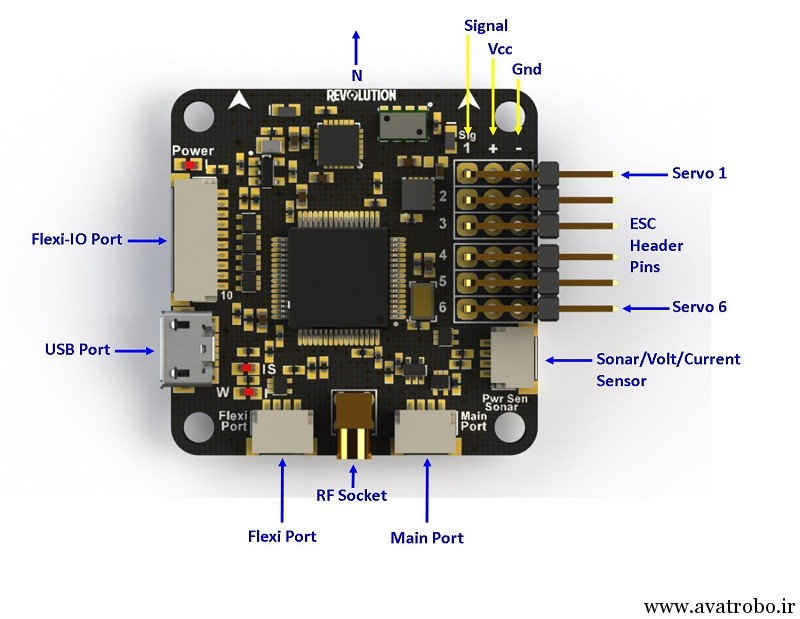
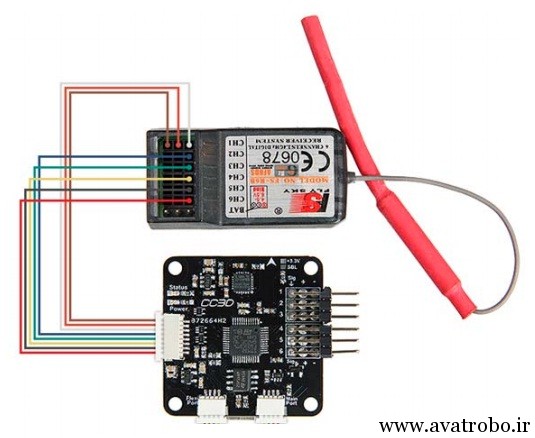
در شکل های زیر قسمت های مختلف یک فلایت کنترل و نحوه اتصال آن به رسیور و موتور ها را میبینید .



نکته قابل توجه برای گذاشتن ملخ ها بر روی موتور این است که ملخ ها دو نوع هستند ، پولر و پوشر . این ملخ های پولر و پوشر جهت پیچشان بر عکس یکدیگر است یعنی در هنگام چرخش موتور یکی به سمت بالا باد می زند و یکی به سمت پایین باد می زند . از آن جا که جهت چرخش موتور ها با هم فرق می کند ( دو موتور ساعتگرد و دو موتور پادساعتگرد ) باید دو ملخ پولر باشند و دو ملخ پوشر زیرا هر چهار ملخ باید به سمت پایین باد بزنند تا بتوانند ربات را بلند کنند . اگر هنگام روشن شدن موتور باد به سمت بالا زد جای ملخ ها را عوض کنید .
نکته قابل توجه دیگر است که همان طور که در شکل بالا می بینید جهت چرخش موتور ها مهم است و باید مثل شکل بالا باشد . اگر موتوری در خلاف جهت چرخش نشان داده شده در شکل می چرخید همان طور که در قسمت اسپیدکنترل توضیح داده شد جای دو سیم را عوض کنید .
رگولاتور :
رگولاتور
رگولاتور : رگولاتور وسیله ای است برای تبدیل ولتاژ باتری به ۵ ولت . دلیل این کار این است که تغذیه مدار های فلایت کنترل ، اسپیدکنترل و رسیور رادیوکنترل همگی ۵ ولت می باشد . رگولاتور دارای دو سر ورودی است که به باتری وصل می شود و دو سر خروجی دارد که به فلایت کنترل متصل می شود . ( برق ۵ ولت اسپیدکنترل و رسیور با اتصال آن ها به فلایت کنترل تامین خواهد شد ) .
شکل زیر یک نمونه رگولاتور می باشد :

برد تقسیم برق :
برد تقسیم برق : این برد معمولا به همرا بدنه به فروش می رسد و جزئی از بسته بندی قطعات بدنه می باشد . وظیفه این برد در کوادکوپتر ها توزیع برق باتری بین قطعاتی است که به ولتاژ باتری نیاز دارند یعنی ۴ عدد اسپیدکنترل و یک عدد رگولاتور به آن لحیم می شود .
برد زیر یک نمونه برد تقسیم برق می باشد . همان طور که می بینید روی برد علامت های مثبت و منفی وجود دارد ، تمام مثبت ها به هم و تمام منفی ها به هم متصل است .
این یعنی با لحیم کردن سر مثبت باتری به یک عدد از مثبت های این برد و منفی باتری به یکی از منفی های این برد ؛ برق باتری در سایر مثبت و منفی ها توزیع می شود و در نتیجه با لحیم کردن سر های مثبت و منفی ۴ عدد اسپیدکنترل و یک عدد رگولاتور برق باتری به آن ها خواهد رسید .

در کوادکوپتری که من ساختم از قطعات زیر استفاده کردم :
-
- موتور ۲۲۰۴ ایمکس ( Emax )
-
- اسپیدکنترلر ۱۲ آمپر ایمکس
-
- فلایت کنترل CC3D
-
- ملخ ۵۰۴۰
-
- بدنه KingKong 260
-
- باتری لیتیوم پلیمر ۲۲۰۰ میلی آمپر ساعت ۳ سل






شکل زیر نحوه به هم متصل کردن قطعات بدنه KingKong 260 را نشان می دهد .

فایل زیر مربوط به آموزش نرم افزار اپن پایلوت ( Open Pilot ) برای انجام تنظیمات فلایت کنترل CC3D میباشد .
برای دانلود این فایل بر روی لینک زیر کلیک کنید .
[purchase_link id=”3855″ text=”اضافهکردن به سبدخرید” style=”button” color=”blue”]


بسیار عالی خسته نباشید
سلام .
خیلی ممنون