به نام خدا
پروژه ی ساخت سیستم هشدار درب با استفاده از آردوینو و سنسور آلتراسونیک
امروزه امنیت یکی از بزرگترین نگرانی های بشر می باشد. تکنولوژی های فراوانی در این زمینه پا به عرصه گذاشته اند . دزدگیر ها یکی از محبوب ترین این موارد هستند. در این پروژه ما با استفاده از سنسور آلتراسونیک و آردوینو یک دزدگیر می سازیم.
سیستم که می سازیم باید نزدیک در باشد تا عبور شخص را تشخیص دهد. هنگامی که شخصی از محدوده ی سنسور آلتراسونیک عبور کند ، بازر شروع به صدا دادن می کند . شما می توانید محدوده ی سنسور را با توجه به مکان درب تنظیم نمایید. همچنین این سیستم می تواند به عنوان یک تشخیص دهنده ی حرکت نیز در جا های دیگر مورد استفاده قرار گیرد.
قطعات مورد نیاز برای ساخت سیستم هشدار درب با استفاده از آردوینو و سنسور آلتراسونیک:
برد بورد
سنسور آلتراسونیک
بازر
آردوینو مگا یا هر مدل دیگر
سیم برد بورد
کابل یو اس بی برای آردوینو
سنسور آلتراسونیک:
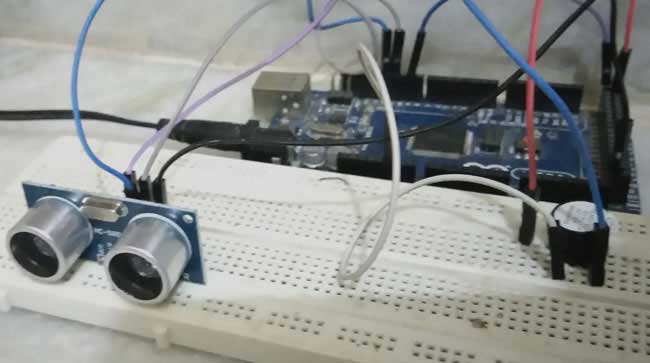
در این پروژه از این سنسور برای تشخیص عبور افراد از در استفاده شده است. این ماژول از دو قسمت فرستنده و گیرنده تشکیل شده است . همانطور که در شکل می بینید سنسور دو استوانه دارد که یکی فرستنده و دیگری گیرنده است.

این سنسور برای محاسبه ی فاصله ی ۲ سانتی متر تا ۴۰۰ سانتی متر با دقت سه میلیمتر استفاده می شود که شامل یک فرستنده و یک گیرنده و مدار کنترل است.این سنسور موجی با فرکانس ۴۰ کیلوهرتز را ساتع می کند و با استفاده از فرمول زیر میتوان به راحتی فاصله را محاسبه کرد.
Distance= (time x speed)/2
شماتیک مدار :

همانطور که در بالا می بینید. اتصالات بسیار ساده هستند. پین Trigger سنسور آلتراسونیک به پین ۱۲ آردوینو و پین ECHO سنسور به پین ۱۱ آردوینو متصل است. Vcc سنسور نیز به پین ۵ ولت آردینو و پین GND سنسور به پین GND آردوینو متصل شده است. یک پین بازر به زمین آردوینو و پین دیگر آن نیز به پین هشتم آن وصل شده است.

دانلود کد پروژه ی سیستم هشدار درب :
دانلود فایل#include <NewPing.h>
#define TRIGGER_PIN 12 // Arduino pin tied to trigger pin on ping sensor.
#define ECHO_PIN 11 // Arduino pin tied to echo pin on ping sensor.
#define MAX_DISTANCE 500 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
unsigned int pingSpeed = 50; // How frequently are we going to send out a ping (in milliseconds). 50ms would be 20 times a second.
unsigned long pingTimer;
int flag = 0; // Holds the next ping time.
void setup() {
Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results.
pingTimer = millis();
pinMode(10, OUTPUT); // Start now.
// Start now.
}
void loop() {
// Notice how there's no delays in this sketch to allow you to do other processing in-line while doing distance pings.
if (millis() >= pingTimer) { // pingSpeed milliseconds since last ping, do another ping.
pingTimer += pingSpeed; // Set the next ping time.
sonar.ping_timer(echoCheck); // Send out the ping, calls "echoCheck" function every 24uS where you can check the ping status.
}
if (flag == 1)
{
digitalWrite(10, HIGH);
delay(500);
digitalWrite(10, LOW);
delay(500);
digitalWrite(10, HIGH);
delay(500);
digitalWrite(10, LOW);
delay(500);
}
else
{
digitalWrite(10, LOW);
}
}
void echoCheck() { // Timer2 interrupt calls this function every 24uS where you can check the ping status.
if (sonar.check_timer()) { // This is how you check to see if the ping was received.
// Here's where you can add code.
Serial.print("Ping: ");
Serial.print(sonar.ping_result / US_ROUNDTRIP_CM); // Ping returned, uS result in ping_result, convert to cm with US_ROUNDTRIP_CM.
Serial.println("cm");
if ((sonar.ping_result / US_ROUNDTRIP_CM) < 50)
flag = 1;
else if ((sonar.ping_result / US_ROUNDTRIP_CM) > 50)
flag = 0;
}
}





دیدگاهها (0)