
به نام خدا
راه اندازی ماژول مادون قرمز به رزبری پای
در این پروژه قصد داریم تا با استفاده از رزبری پای یک سنسور مادون قرمز را راه اندازی کنیم. از این سنسور ها در ربات هایی مثل ربات دنبال کننده خط و … استفاده می شود. این سیستم می تواند حظور هر نوع شی را در مقابل خود تشخیص دهد. همچنین می تواند تفاوت بین رنگ های سفید و مشکی را تشخیص دهد. در ادامه می آموزیم که چگونه می توان با استفاده از رزبری پای یکی از این سنسور ها را راه اندازی کرد. در این پروژه هنگامی که شی مقابل سنسور قرار ندارد ال ای دی قرمز روشن است و به محض اینکه شی مقابل سنسور قرار گیرد ال ای دی سبز روشن می شود.
قطعات مورد نیاز راه اندازی ماژول مادون قرمز به رزبری پای :
رزبری پای سه یا از هر مدل دیگر
سنسور مادون قرمز
ال ای دی های قرمز و سبز
برد برد
سیم برد بردی
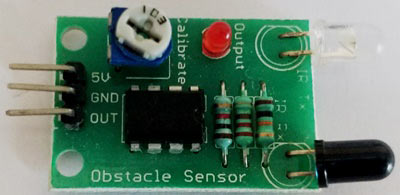
ماژول مادون قرمز:
این ماژول دارای دو سنسور فرستنده و گیرنده مادون قرمز می باشد. محدوده فاصله قابل تشخیص برابر با ۱cm تا ۵cm می باشد، که با استفاده از پتانسیومتر موجود بر روی ماژول قابل تنظیم است. ولتاژ کاری نیز برابر با ۳٫۳V-5V بوده و خروجی این ماژول نیز به صورت دیجیتال می باشد. فرستنده ی این ماژول به طور پیوسته امواج مادون قرمز منتشر می کند هنگامی جسمی مقابل ان بود امواج باز تاب شده و به سطح گیرنده برخورد می کند و بر روی خروجی سیگنال ظاهر می گردد.
شماتیک مدار راه اندازی ماژول مادون قرمز به رزبری پای :
شماتیک مدار و اتصالات بین رزبری پای و سنسور و ال ای دی ها را در زیر مشاهده می کنید. همانطور که مشاهده می کنید شماتیک مدار بسیار ساده است و به راحتی توسط کاربر قابل پیاده سازیست.

دانلود کد برنامه راه اندازی ماژول مادون قرمز به رزبری پای :
دانلود فایلimport RPi.GPIO as IO import time IO.setwarnings(False) IO.setmode(IO.BCM) IO.setup(2,IO.OUT) #GPIO 2 -> Red LED as output IO.setup(3,IO.OUT) #GPIO 3 -> Green LED as output IO.setup(14,IO.IN) #GPIO 14 -> IR sensor as input while 1: if(IO.input(14)==True): #object is far away IO.output(2,True) #Red led ON IO.output(3,False) # Green led OFF if(IO.input(14)==False): #object is near IO.output(3,True) #Green led ON IO.output(2,False) # Red led OFF





دیدگاهها (0)