
به نام خدا
آموزش کامل کنترل سروو موتور با متلب همراه با عکس
در این پروژه ما به شما طریقه ی اتصال مستقیم آردوینو و متلب را به شما آموزش می دهیم. به این ترتیب ما می توانیم آردوینو را با متلب برنامه نویسی کنیم. این شیوه برای کار های پیچیده ی رباتیک مانند کنترل بازوی رباتیک بسیار کارامد است. به اینگونه ک شما برنامه ی پیچیده ی خود را در متلب پردازش می کنید و سپس آن را روی آردوینو پیاده سازی می کنید.
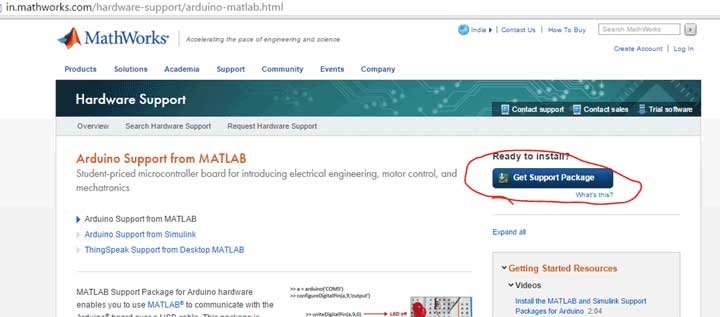
قبل از همه شما باید پیکیج متلب آردوینو را از لینک زیر دانلود کنید.
http://in.mathworks.com/hardware-support/arduino-matlab.html
مراحل انجام پروژه کنترل سروو موتور با متلب:
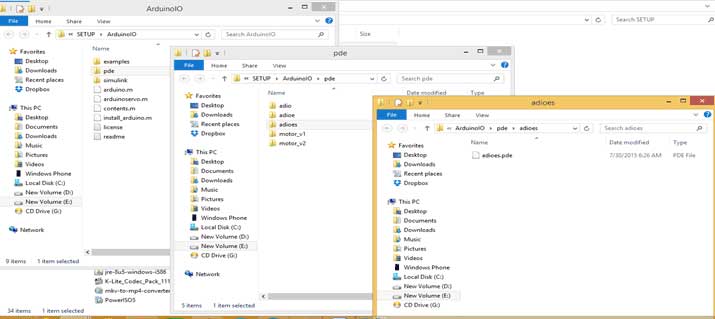
فایل زیپ را دانلود کنید سپس آن را در پوشه ایاکسترکت کنید و نام آن را ArduinoIO بگذارید . سپس Arduino IDE را باز کنید و بر روی I am using Arduino 1.0.6 کلیک کنید. بر روی منوی فایل کلیک کنید و سپس پوشه ی ArduinoIO باز کنید و فایل .pde را انتخاب کنید. سپس فایل adioes.pde را انتخاب کنید . با باز کردن Arduino IDE می توانید فایل های pde مختلفی را امتحان کنید. در اینجا سروو موتور را بر میگزینیم.
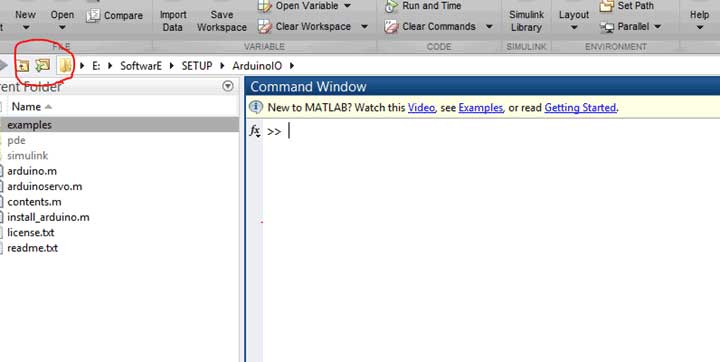
اکنون در گام آخر باید adioes.pde را بر روی آردوینو خود آپلود کنید و بعد از آن وارد متلب خواهیم شد. کد های متلب توسط تصاویر به شما آموزش داده خواهد شد. مهم ترین کار قرار دادن پوشه ی ArduinoIO به عنوان پوشه ی اصلی در متلب است.
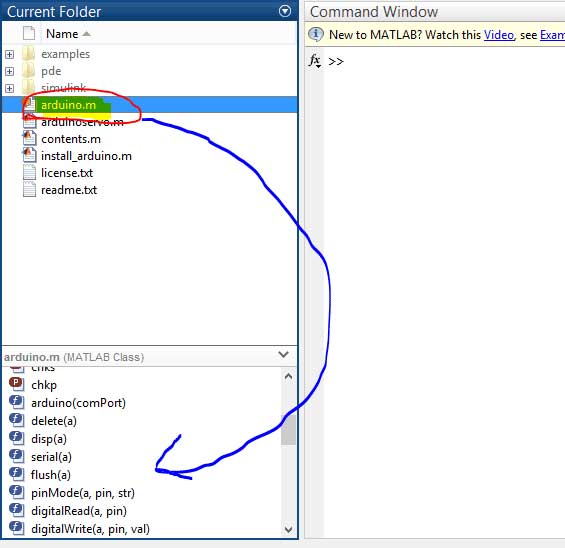
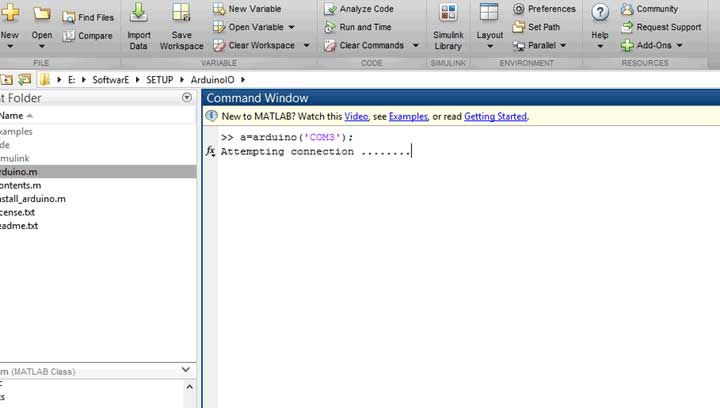
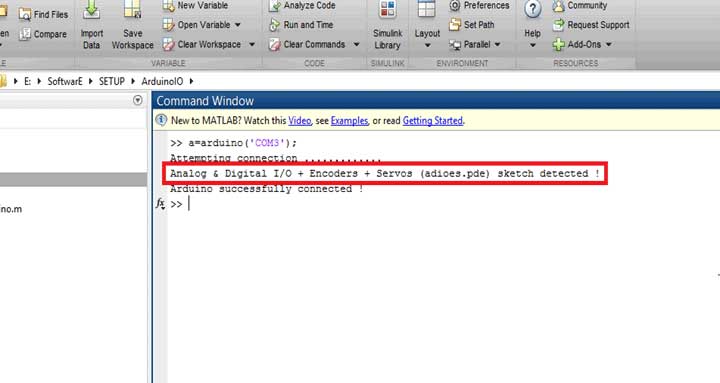
اکنون بر روی arduino.m کلیک کرده تا توابع و دستورات قابل استفاده را دریافت کنید. مشاهده می شود که اولین (arduino(comport دستور می باشد. اولین دستور که a=arduino(“COM3”); می باشد یک متغیر میسازد که a نام دارد. این متغیر باعث می شود تا آردوینو و متلب با یکدیگر ارتباط برقرار کنند. بعد از این چند ثانیه طول می کشد تا اتصال برقرار شود. در شکل زیر می توانید مراحل انجام شده را مشاهده کنید. در () باید com وصل شده ی آردوینو را وارد کنید.
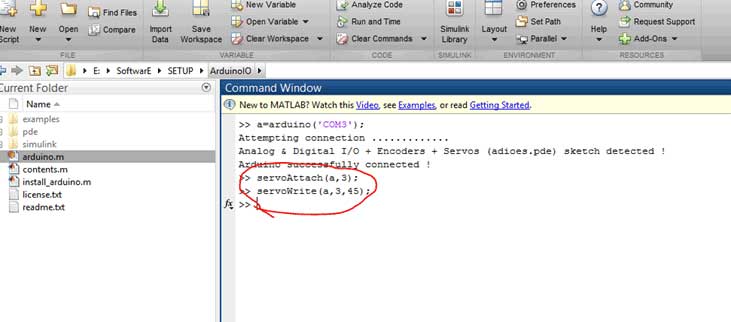
بعد از آن شما باید سروو موتور را به یکی از پین های pwm آردوینو متصل کنید. در اینجا پین ۳ انتخاب شده است اما شما می توانید هر پینی که pwm دارد را انتخاب کنید. برای اینکار باید از دستور servoAttach(a,3); استفاده کنید. بعد از اتصال سروو موتور ، شما می توانید به آن فرمان دهید تا به هر زاویه ای که میخواهد بچرخد. برای اینکه ۴۵ درجه چرخش داشته باشد باید از فرمان servoWrite(a,3,45) استفاده کنید.در این پروژه از سروو موتوری که ولتاژ تغذیه آم ۷٫۴ ولت است استفاده شده است و برای تغذیه باتری LiPo بکار رفته است. یکی از نکات مهم اتصال زمین منبع به زمین آردوینو می باشد. در غیر این صورت مدار کار نمی کند و باعث خراب شدن آردوینو می شود.






دیدگاهها (0)